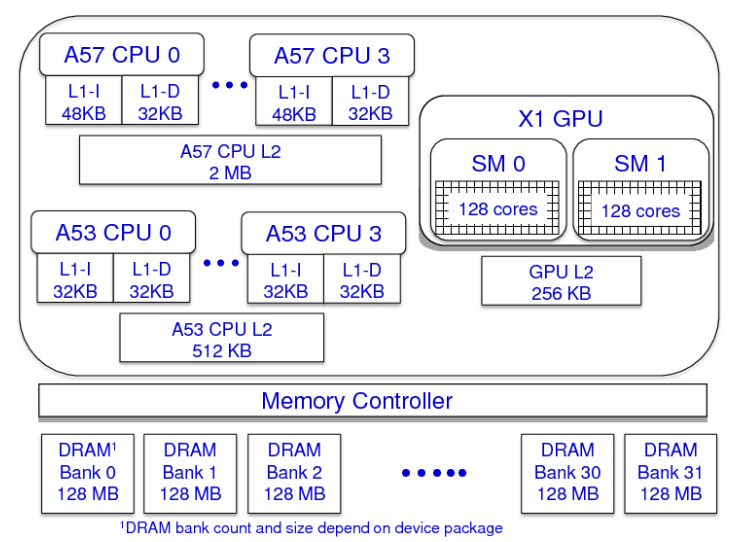
手里有一些Jetson nano和Jetson TX2,最近做了一些非常浅显的性能测试,后找到一篇RTAS的论文获取一些洞见。
文章是基于自动驾驶系统,safety-critical real-time systems。
Safety-critical embedded systems are undergoing an evolution towards greater autonomy. This evolution is perhaps best exemplified by current trends in the automotive industry.
DRAM organization: 集成的GPU与CPU是共享内存的。 Integrated GPUs v.s. Discrete GPUs.
作为integrated GPU,有一个特性叫做zero-copy memory: 可以让GPU直接使用host的主存,且无需移动数据,原理就是只传递指针。与unified memory不同,unified memory还是会进行拷贝,只不过在用户看来,GPU显存和内存被统一了。
With zero-copy memory, the CPU and the GPU can access the same memory area, avoiding GPU memory allocations and data copies between CPU and GPU memory.
GPU Scheduling:
Whether GPU co-scheduling should be allowed, i.e., whether different tasks should be able to access the GPU concurrently. 让不同的任务可以同时调用GPU。这一点对于自动驾驶系统非常有意义。此外,30帧的识别速度对于自动驾驶系统还是不够用,尤其是在某些紧急情况下。
正常情况下,只有一个stream,所有的计算(kernel)在FIFO order which determined by the GPU
scheduling。而如果开启了co-scheduling,多个streams就可以同时执行(但一般并不会有什么性能提升)。
Previous work:GPU co-scheduling must be avoided because concurrently executing kernels might adversely interfere with each other.
其实语音系统,也可以说作为自动驾驶的辅助而不借助云端。
调研:
Google Assistant is moving from cloud to local.
Siri等是什么样的解决方案。
An Evaluation of the NVIDIA TX1 for Supporting Real-time Computer-Vision Workloads. - RTAS(CCF-B)